Цифровой двухкоординатный автоколлиматор с разрешением 0.001 угловой секунды
Автоколлиматоры широко используются во многих
задачах угловых измерений. Угловые измерения высокой точности востребованы
многими критическими технологиями, основанными на использовании высокоточного
машиностроительного и приборостроительного производства. Особо важными являются
точные угловые измерения для технологий связанных с разработкой и созданием
систем навигации и ориентации, в том числе точных гироскопов, кодовых датчиков
угла, авиационных, космических и морских систем навигации и астроориентации,
а также при создании крупногабаритных оптических систем и большебазных интерферометров.
Авторами разработан цифровой фотоэлектрический
двухкоординатный автоколлиматор с использованием в качестве фотоприемного
и измерительного элемента телевизионной камеры на основе ПЗС-матрицы. Работа
с автоколлиматором производится с помощью специального программного комплекса,
который обеспечивает полную автоматизацию процесса измерений. Производство
таких цифровых автоколлиматоров обеспечит внедрение в метрологическую практику
линейки цифровых автоколлиматоров с погрешностью в диапазоне 0.1-0.01 угл.
сек.
В настоящее время ПЗС линейки и матрицы широко используются для решения широкого круга задач в линейных и угловых измерениях в связи с тем, что они являются уникальным прибором, который одновременно формирует информационный сигнал и является измерительной шкалой.
Результаты исследований, связанные с этим направлением использования ПЗС-матриц, приведены в работах [1,2].
Фирма «TRIOPTICS» (Германия) выпускает на ПЗС матрицах серию автоколлиматоров «TRIANGLE» с фокусными расстояниями от 1000 мм до 100 мм, с разрешением от 0.01 до 0.1 угл. сек и с погрешностью от 0.2 до 2.5 угл. сек.
Фирма «MOELLER-WEDEL» (Германия) выпускает прецизионные метрологические автоколлиматоры «ELCOMAT 3000» «ELCOMAT HR» с разрешением 0.005 угл. сек и с погрешностью от 0.1 до 0.01 угл. сек. с использованием ПЗС-линеек.
Далее приведены технические характеристики разработанного цифрового автоколлиматора:
1. Дискретность выходных данных – от 0.1" до 0.001".
2. Диапазон измерений угла ±10' по горизонтальной оси и ±7'
по вертикальной оси.
3. Средняя квадратическая случайная погрешность измерения
углов по каждой из осей в пределах диапазона измерений - не более ±0.01"
при цикле накопления не более 10 с.
4. Полная погрешность измерений в нормальных условиях в диапазоне
измерений угла ±5' по горизонтальной оси и ±5' по вертикальной оси - не более
±0.1".
Полная погрешность измерений в диапазонах измерений более ±5' – не более ±0.5".
Полная погрешность измерений  определяется зависимостью определяется зависимостью
 , ,
где  – средняя квадратическая случайная погрешность измерения углов, – средняя квадратическая случайная погрешность измерения углов,
 – дополнительная погрешность измерений, вызванная изменением внешних условий, – дополнительная погрешность измерений, вызванная изменением внешних условий,
 – стандартная неопределенность калибровки. – стандартная неопределенность калибровки.
5. Погрешности измерения нормируются для нормальных условий выполнения линейно- угловых измерений (п.4.2.2) и расстояния до зеркала не более 0.5 м.
6. Время подготовки ЦАК к работе - не более 2 часов.
7. Диаметр выходного зрачка коллиматора 50 мм.
8. Расстояние от основания до
оси объектива 100мм.
9. Предел регулирования визирной оси
- в горизонтальной плоскости не менее 2о,
- в вертикальной плоскости не менее 40'.
Оптическая схема прибора приведена на рис. 1.
Рис. 1
Оптическая схема автоколлиматора
(1 - светодиод, 2 – автоколлимационная марка, 3 - ПЗС-матрица, 4 - призма-куб, 5 - объектив, 6 – зеркало).
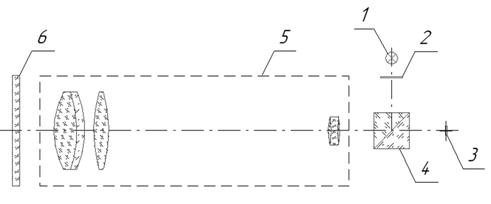
Автоколлимационная марка (перекрестье) 2, освещенное светодиодом 1, расположено в фокальной плоскости объектива 5. Лучи света, выходящие из объектива 5 параллельным пучком, отражаются от зеркала
6, и, в обратном ходе через объектив 5 и светоделитель 4, формируют автоколлимационное
изображение перекрестья на фотоприемнике (матрице ПЗС-камеры) 3.
В оптико-электронном блоке (1,2,3,4) использована цифровая ПЗС камера «Видеоскан-415» и светодиод L-793SRD-H (красный).
При повороте зеркала на угол α, отраженные от него лучи поворачиваются на двойной угол 2α и изображение перекрестья в плоскости матрицы изменяет свое положение.
Программа определяет смещение перекрестья в пикселях, а затем вычисляет величину угла в угловых секундах с помощью формулы:
| (1) |
 |
где:
S – смещение перекрестья в пикселях;
d - размер светочувствительных элементов матрицы;
F - фокусное расстояние объектива;
k – калибровочный коэффициент.
Вычисление координат центра тяжести изображения перекрестья на фотоприемнике светового излучения – телевизионной ПЗС-камере производится в соответствии с выражениями:
где:
Сх, Су – координаты центра тяжести по осям Х и Y, соответственно;
In,m
– элементы матрицы яркостей;
N, M
– число столбцов и строк матрицы яркостей;
n, m
– порядковые индексы по столбцам и строкам матрицы.
В формуле (1) номинальные конструктивные параметры соответствуют
информации изготовителя и составляют, соответственно:
- фокусное расстояние F= 500 мм;
- размеры пикселя dx = 8.3 мкм и dy = 8.3 мкм.
Для обеспечения точного перевода линейных смещений изображения
перекрестья на ПЗС-матрице в угловую величину выполняется калибровка прибора,
при этом определяется калибровочный коэффициент k. По сути, целью калибровки является уточнение номинальных
конструктивных параметров d и F в
вышеприведенной формуле.
Далее приведено краткое описание методики работы с прибором.
Работа с автоколлиматором осуществляется с помощью персонального
компьютера (ПК) и программы «Автоколлиматор». К USB-портам компьютера необходимо
подключить шнуры светодиода и камеры. Никакого дополнительного питания не
требуется.
| Рис. 2 |
 |
 |
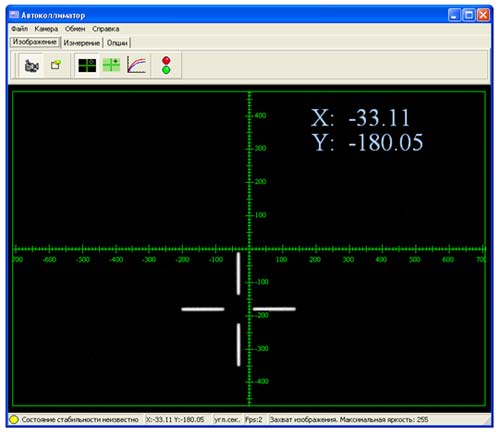
На рис. 2. приведены основные окна программы
«Автоколлиматор». Для удобства контроля положения перекрестья отображается
измерительная шкала.
Программа позволяет задавать различные параметры:
выбирать единицы измерения, цену деления шкалы, разрешение (точность измерений),
значение фокусного расстояния объектива, калибровочные коэффициенты для осей
Х и Y, а также осуществлять настройку камеры (экспозиция
и усиление).
С целью минимизации влияния шума вводится значение
пороговой яркости. Все значения сигнала в поле матрицы, которые меньше пороговой
яркости, приравниваются к нулю.
Программа позволяет производить расчет разности
координат между половинками вертикального и горизонтального штрихов перекрестья.
Это необходимо для точного разворота перекрестья относительно столбцов и строк
матрицы при юстировке. При этом в поле дополнительной информации строки состояния
отображаются результаты измерения разности координат в текущем кадре. Эксперименты
показывают возможность юстировки разворота перекрестья с погрешностью до десятых
долей угловой секунды. Необходимость такой юстировки связана, в частности,
с обеспечением измерений на краю диапазона, когда часть перекрестья может
выйти за пределы поля зрения.
В программе реализована функция контроля стабилизации
прибора. Оценка условий стабилизации измерительных характеристик прибора связана
с необходимостью контроля геометрической деформации ПЗС-матрицы вследствие
нагревания после ее подключения к источнику питания и выработкой критерия,
необходимого и достаточного для утверждения о стабилизации ПЗС-матрицы.
Предварительные исследования камеры показали,
что время стабилизации матрицы составляет порядка 90-100 минут.
Для контроля стабильности прибора измеряются
текущие значения угловой координаты по X и Y и вычисляется тренд за период
измерений 10 минут. Это значение является основным критерием для принятия
решения о стабилизации прибора. Очевидно, что эта величина зависит от требований
к точности измерений. Например, если эти значения находятся в диапазоне 0.0005
угл.сек/мин по обоим направлениям, то это означает, что в течении 20 минут
измерений погрешность, связанная с трендом не превысит 0.01 угл.сек.
Стабилизация прибора контролировалась с помощью
указанной процедуры при использовании в качестве отражателя призмы БКР-180
(световозвращатель). Пороговое значение тренда было установлено равным 0.0002
угл.сек/мин.
В таблице 1 приведены результаты измерений на
последней стадии стабилизации в интервале 60-72 минуты после включения программы.
Таблица 1
| минута |
Х |
Y |
тренд
по Х |
тренд
по Y |
| 60 |
-26.4918 |
-104.0304 |
-0.00095925 |
0.00044057 |
| 61 |
-26.4915 |
-104.0303 |
-0.00064184 |
0.00055136 |
| 62 |
-26.4918 |
-104.0310 |
-0.00030539 |
0.00054638 |
| 63 |
-26.4917 |
-104.0313 |
-0.00014733 |
0.00018664 |
| 64 |
-26.4920 |
-104.0300 |
-0.00011027 |
0.00014807 |
| 65 |
-26.4918 |
-104.0318 |
-0.00009114 |
0.00013537 |
| 66 |
-26.4920 |
-104.0317 |
-0.00007689 |
0.00010558 |
| 67 |
-26.4925 |
-104.0294 |
-0.00006221 |
0.00006669 |
| 68 |
-26.4918 |
-104.0304 |
-0.00006505 |
0.0000097 |
| 69 |
-26.4912 |
-104.0321 |
-0.00000587 |
0.00006998 |
| 70 |
-26.4920 |
-104.0309 |
-0.00001452 |
0.00003791 |
| 71 |
-26.4915 |
-104.0316 |
0.00002516 |
0.00003918 |
| 72 |
-26.4919 |
-104.0315 |
0.00002171 |
0.00006182 |
СКО результатов приведенной серии измерений составляет
для направлений X и Y 0.0003
и 0.0008 угл.сек соответственно. На последних 10 минутах значение трендов
по обоим направления не превышает установленный порог. На 73 минуте программа
выводит сообщение «Прибор стабилизирован».
Таким образом, измерительная часть прибора стабилизируется
за время менее 100 минут. Разброс результатов измерений по завершению стабилизации
составляет ±0.001 угл. сек. Однако, следует иметь в виду, что если в качестве
отражателя используется зеркало, то решающее значение будет иметь стабильность
всей конструкции «автоколлиматор-зеркало».
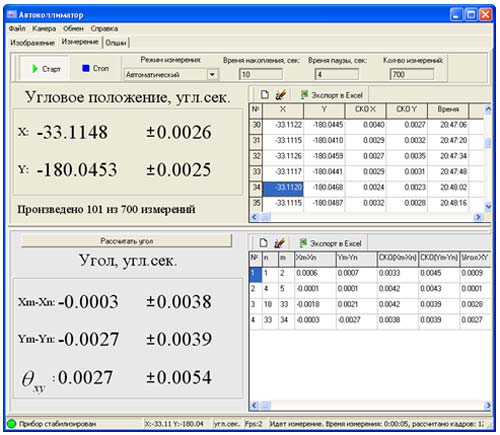
Рабочее пространство панели «Измерение» (рис.
2) делится на две панели: панель измерения угловой координаты и панель измерения
угла. При необходимости соотношение высот панелей можно изменять горизонтальным
подвижным разделителем).
Панель измерения угловой координаты имеет панель
инструментов с кнопками и полями ввода для выбора условий измерений: режима
измерений (ручной, автоматический), времени паузы, времени измерения и количества
измерений. Кнопки «Старт» и «Стоп» управляют циклом измерений в обоих режимах.
По умолчанию время накопления равно 10 сек. В ручном режиме поля ввода времени
паузы и количества измерений неактивно.
Слева не панели отображаются измеренные значения
угловой координаты по осям Х и Y в текущем измерении, а также удвоенное значение СКО.
Удвоение СКО позволяет повысить доверительную вероятность оценки случайной
погрешности. Также при автоматическом режиме измерений здесь отображается
число произведенных измерений из общего числа заданных.
На правой стороне панели результаты измерений
отображаются в табличном виде. В таблице отображаются значения угловых координат
по осям Х и Y, соответствующие СКО и текущее время
выполнения измерения с точностью до секунд.
Программа позволяет выводить графики результатов
измерений, а также предоставляет некоторые возможности работы с таблицами
результатов: можно очистить таблицу, стереть любую строку, скопировать содержимое
таблицы в Excel, например, таблица 2:
Таблица 2
Протокол результатов измерения |
№
изме-
рения |
X |
Y |
Стандартное
отколонение
по Х |
Стандартное
отколонение
по Y |
Время
измерения |
| 1 |
-1.938 |
142.872 |
0.002 |
0.007 |
23:17:32 |
| 2 |
-1.939 |
142.867 |
0.002 |
0.007 |
23:17:44 |
| 3 |
-1.940 |
142.872 |
0.002 |
0.007 |
23:17:55 |
| 4 |
-1.937 |
142.871 |
0.002 |
0.006 |
23:18:06 |
| 5 |
-1.940 |
142.870 |
0.002 |
0.007 |
23:18:17 |
Панель измерения угла обеспечивает измерение
угла между любыми измеренными угловыми положениями (положениями зеркала).
При наличии только двух угловых положений для
расчета угла достаточно нажать на кнопку «Рассчитать угол» и в таблице появится
результат вычисления. Если было получено множество угловых положений, то в
окне «Выберите положения» необходимо указывать пары номеров этих положений
из таблицы угловых положений. Ввод номеров пар осуществляется с клавиатуры
или мышкой, щелкнув в области нужной строки таблицы угловых положений. В таблице
формируются строки с результатами вычислений значений углов для всех введенных
пар.
В таблице результатов отображаются значения углов,
приведенные к осям Х и Y, а также абсолютный угол
в двумерном пространстве координат. Тут же отображаются соответствующие СКО.
На рис. 1 приведен пример с результатами измерения
углов.
Ниже (таблица 3) приведен пример таблицыExcel с результатами измерения углов.
Таблица 3
| Протокол результатов измерения |
№
изме-
рения |
Поло-
жение
n |
Поло-
жение
m |
Угол
по оси X
(Xm-Xn) |
Угол
по оси Y
(Ym-Yn) |
Стандартное
отколонение
по оси Х |
Стандартное
отколонение
по оси Y |
Двумерный
угол |
Стандартное
отколонение
двумерного
угла |
| 1 |
1 |
2 |
0,0006 |
0,0007 |
0,0033 |
0,0045 |
0,0009 |
0,0056 |
| 2 |
4 |
5 |
-0,0001 |
0,0001 |
0,0042 |
0,0043 |
0,0001 |
0,006 |
| 3 |
18 |
33 |
-0,0018 |
0,0021 |
0,0042 |
0,0039 |
0,0028 |
0,0057 |
| 4 |
33 |
34 |
-0,0003 |
-0,0027 |
0,0038 |
0,0039 |
0,0027 |
0,0054 |
В программе предусмотрена возможность обмена
данными с любым другим приложением. Для этого в комплект поставки программы
включена специальная библиотека динамической компоновки. Библиотека содержит
все необходимые экспортируемые функции. Для обеспечения обмена данными по
сети используется архитектура «клиент-сервер» с протоколом обмена TCP/IP.
Библиотека включает в себя функции посылки управляющих команд (старт измерения,
запрос о состоянии стабилизации, установка времени накопления, запрос текущего
времени накопления, запрос результатов измерения) и приема ответных сообщений.
наверх
|