Новая концепция измерения угла;
модельные и экспериментальные исследования
Королев А.Н., Лукин А.Я., Полищук Г.С.
Известны многочисленные прецизионные преобразователи и измерители угла, наиболее совершенными из которых являются оптико-электронные приборы, использующие кодовое и растровое преобразование. Такие измерители выпускаются как в России, например, СКБ ИС [1] , так и за рубежом, например, HEIDENHAIN GmbH (Германия) [2] и RENISHAW (Великобритания) [3].
В качестве меры угла в угловых оптоэлектронных растровых преобразователях используется радиальная или цилиндрическая растровая шкала, которая считывается анализатором, выполненным также в форме растра. Для точных преобразователей количество штрихов растра составляет несколько сотен тысяч при шаге в несколько микрометров. Поэтому размеры стеклянных дисков с растровой шкалой составляют 20-30 см. Высокие требования к стабильности взаимного расположения анализатора и измерительного растра приводит к необходимости установки преобразователя на высокоточный шпиндель с использованием прецизионных или воздушных подшипников.
При уровне точности в единицы угловых секунд и менее основными недостатками этих приборов являются:
- большие габариты и масса устройств,
- ограниченная точности измерений из-за влияния люфтов и вибраций,
- высокая стоимость приборов.
Целью данной статьи является описание новой концепции измерения угла, основанной на измерении угла поворота изображения марки, представляющей собой упорядоченное множество однотипных элементов, относительно декартовой системы координат строк и столбцов фотоприемной матрицы цифровой ТВ камеры [4], а также анализ некоторых результатов модельных и экспериментальных исследований новой измерительной технологии.
Сформулируем основные отличительные особенности новой концепции измерения угла.
Во-первых, это переход от анализа одномерной растровой шкалы к анализу двумерного информационного поля, что требует совершенно новых конструктивных решений и технологии обработки данных. Важным при этом является высокий уровень усреднения координат элементов марки, пропорциональный M2, где M – число элементов в измерительном поле, поскольку вычисление средневзвешенных координат выполняется для M элементов по оси X и для M элементов по оси Y. Общее число элементов в анализируемом поле составляет при этом несколько сотен.
Во-вторых, в связи высоким уровнем усреднения, измерительная система становится чрезвычайно устойчивой к влиянию дестабилизирующих факторов, например, шума приемника излучения и пр. Следствием этого является высокая разрешающая способность новой измерительной технологии, что позволяет использовать измерительное поле малых размеров. Погрешность измерений на уровне 1 угловой секунды может быть получена на светочувствительной матрице размером менее 10 мм. Это почти на два порядка меньше габаритов растровых датчиков.
Во-третьих, следствием новой технологии является потеря привязки результатов измерения угла к оси вращения. Очевидно, что любые поперечные поступательные смещения не будут приводить к изменению результатов измерения угла. В этом существенное отличие от описанных выше известных измерительных технологий.
В-четвертых, следует отметить возможность аттестации нового измерителя угла с помощью образцового средства с последующей установкой его на объект измерения, что невозможно для вышеуказанных растровых преобразователей.
В-пятых, возможность синтеза изображений марки с любым произвольным углом поворота с высокой точностью позволяет получить для данной технологии эталоны угла в форме цифровых файлов. Это совершенно новая ситуация для метрологии. Если подумать, в этом нет никакого противоречия. Ведь в отличие от множества измеряемых величин, для которых существуют физические эталоны, угол по определению, величина безразмерная.
Совокупность перечисленных свойств и возможностей позволяет говорить именно о новой концепции измерения угла, а сама концепция может служить основой для создания широкого класса достаточно простых, компактных и недорогих датчиков и измерителей плоского угла различного назначения и уровня точности.
Следует отметить, что количество измерений в единицу времени для данной технологии определяется частотой кадров ТВ камеры и для повышения быстродействия следует использовать скоростные ТВ камеры с большой частотой кадров.
Рис. 1
Схема измерителя угла, иллюстрирующая новую концепцию, приведена на рис. 1. Оптическая марка 2 с осветителем вращается вместе с ротором 1 и изображается объективом 3 на фотоприемной матрице цифровой камеры 4. Выходной сигнал с выхода ТВ камеры 4 подается в компьютер 5, который выполняет преобразование и обработку видеоданных, обеспечивая определение угла поворота марки относительно координат фотоприемной матрицы.
Конфигурация оптической марки представляет собой двумерное множество элементов с известным расположением, например, ортогональную решетку из элементов в форме круга с относительной яркостью 1 на фоне с относительной яркостью 0.
Поскольку ортогональная решетка обладает свойством симметрии относительно поворотов на определенные углы (0, 90, 180 и 270 градусов), необходимы метки, однозначно определяющие ориентацию марки. В марке использованы три элемента, имеющие больший диаметр по сравнению с остальными и образующие неравносторонний треугольник. Положение этого треугольника определяет ориентацию решетки и обеспечивает диапазон измерения 0-360о.
Очевидно, что, чем больше число элементов решетки и геометрический размер матрицы цифровой камеры, тем выше точность измерения. Размер элемента (диаметр круга) определяет точность определения координаты элемента и его уменьшение с целью увеличения числа элементов снижает точность. Оптимальная конфигурация предполагает определенный компромисс между диаметром элементов и шагом решетки элементов.
Очевидно, что в данной схеме марка может быть расположена даже на значительном расстоянии от оси вращения ротора.
В работе не обсуждаются конструкция датчика, оптимальные параметры марки и специфические алгоритмы обработки и преобразования массива видеоданных для получения абсолютного значения угла.
Рис. 2
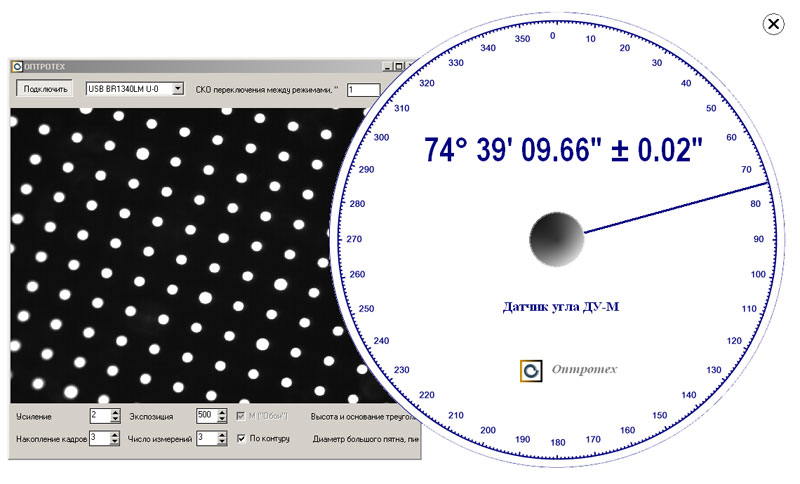
На рис. 2 приведена угловая шкала экспериментального измерителя угла с результатом измерения и программная панель с элементами ввода исходных данных и контроля процесса измерения, включающее изображение оптической марки. В качестве приемника излучения использовалась ТВ камера BR-1340LM-UF [5] с КМОП*) матрицей размером 5.7х6.3 мм (1280х1024 пикс, пиксел 5.2х5.2 мкм); увеличение объектива равно 1.
Внизу программной панели видны окна: Накопление кадров - 3, Число измерений – 3. Это означает, что для единичного измерения производится накопление по 3 кадрам. Для получения результата, приведенного на циферблате использовано 3 измерения. При использовании более 1 измерения производится вычисление СКО результата измерения, что и показано на циферблате рядом с измеренной величиной угла в виде «± 0.02 угл. сек.». При многократных измерениях в одном угловом положении за время порядка 1 минуты сходимость измерений составила 0.08 угл. сек.
На результат измерения угла влияет целый ряд факторов. Однако такие характеристики приемника, как нелинейность световой характеристики, темновой шум, фотонный шум, неравномерность чувствительности пикселов, растекание заряда (блюминг) и т.п. отнюдь не являются главными факторами, искажающими результаты измерений. Их влияние можно минимизировать алгоритмическими средствами.
Главными факторами, определяющими погрешность измерения в данном случае являются шумы дискретизации и анизотропная дисторсия объектива, приводящая к детерминированным сдвигам изображения отдельных элементов марки. Поскольку цифровое дискретизованное изображение марки представляет собой картину наложения двух периодических структур (периодическая структура элементов марки и структура светочувствительной матрицы), то в определенных положениях возникают резонансные картины биений, приводящие к сдвигам элементов и искажающие результаты измерений. Это детерминированные отклонения являются существенной составляющей погрешности, и могут давать и единичные выбросы за пределы 3?, где ? – СКО детерминированной случайной погрешности измерения в диапазоне измерений 0-360о. Эти выбросы можно уменьшить путем введения стохастических отклонений геометрии марки в части шага и диаметра элементов. Этот вариант был успешно опробован в модельных исследованиях.
Максимальное значение дисторсии объектива в экспериментальном образце измерителя угла составляло на краю поля всего несколько микрон. Ее точное измерение не составляет труда при наличии марки с периодической структурой элементов. Такая величина дисторсии приводит к систематической погрешности измерений в каждой точке угловой шкалы, причем ее максимальная величина может достигать 10-15 угловых секунд. Использование более качественной оптики позволит значительно уменьшить эту составляющую погрешности, а при нулевой дисторсии вообще исключить ее.
Метрологическая аттестация экспериментального образца измерителя угла проводилась с помощью углоизмерительного стола (УИС), использующего растровый метод измерения угла и голографическую угловую шкалу с шагом растра порядка 1 мкм и диаметром 180 мм. УИС изготовлен в Лаборатории информационно-измерительных систем Петербургского института ядерной физики им. Б.П. Константинова РАН (ПИЯФ РАН) [6]. Подобный прибор используется в лаборатории угловых измерений ВНИИМ им. Д.И.Менделеева в составе Государственного эталона угла и его точность оценивается величиной порядка 0.2 угл. сек.
Рис. 3
Сначала проводилась калибровка измерителя угла в диапазоне 0-360о с шагом 1 градус. Полученная совокупность точек описывает систематическую погрешность измерителя, связанную с дисторсией, достаточно гладкой функцией, которая вводится в память программы и позволяет выполнять коррекцию в любой точке шкалы. Для вычисления величины коррекции внутри интервалов в 1 градус производится кубическая интерполяция.
График отклонений результатов измерений между показаниями экспериментального измерителя угла и вышеуказанного образцового средства измерений угла в диапазоне 0-360 градусов с учетом коррекции систематической погрешности приведен на рис. 3. СКО погрешности единичного измерения составляет 0.25 угл. сек., максимальное отклонение составляет около 1 угл. сек.
В процессе исследований достаточно трудно экспериментально определить оптимальные конфигурации марки и предельные метрологические возможности новой измерительной технологии.
Поэтому стала очевидной необходимость разработки математической модели измерителя угла, использующего генератор изображений марки с любым углом поворота и стандартный для данного измерителя алгоритм обработки изображения марки и вычисления угла. Создание программы генерации изображения марки интересно также в связи с возможностью создания для данной измерительной технологии цифровых эталонов угла в форме файлов изображений.
Для корректного и полного описания изображения марки в программе моделирования необходимо, чтобы генератор при формировании изображения марки обеспечивал учет следующих параметров: 1) размер фотоприемной матрицы в пикселах, 2) диаметр элементов марки, 3) шаг решетки марки, 4) оптическую передаточную функцию объектива, 5) шумы фотоприемной матрицы, 6) количество кадров, по которым производится усреднение результатов для одного измерения, 7) количество измерений, по которым производится усреднение при получении окончательного результата измерения.
Воздействие дисторсии в данной модели не учитывалось.
Главная проблема разработки модели состояла в формировании дискретизованного изображения марки для произвольного угла. Формирование дискретного массива данных из аналитического описания решетки элементов методом поэлементного интегрирования весьма затруднительно. Поэтому был использован метод формирования дискретизованных элементов марки с дробным сдвигом центра тяжести относительно решетки отсчетов, примененный авторами в работе [7].
Пусть  - координаты
центров элементов (круглых апертур) по строкам n и по столбцам k решетки для значения угла поворота - координаты
центров элементов (круглых апертур) по строкам n и по столбцам k решетки для значения угла поворота  Вычисление
координат центров при повороте на произвольный угол Вычисление
координат центров при повороте на произвольный угол  производится по известным формулам преобразования координат производится по известным формулам преобразования координат
 (1). (1).
Разделив координаты центров xαn,k и yαn,k элемента с номером n,k на размер пиксела КМОП матрицы, получаем значения координат данного
элемента в долях пиксела. При этом целая часть полученных значений определяет
местоположение элемента в поле дискретизованного изображения марки, а дробная
часть служит для синтеза изображения этого элемента со сдвигом цетра тяжести на
дробную часть пиксела.
Процедура синтеза дискретной
модели каждой круговой апертуры марки состояла из следующих операций:
1. вычисление спектра Фурье объекта
 , (3) , (3)
где ω – пространственная частота, знак  - означает прямое преобразование Фурье. Объектом - означает прямое преобразование Фурье. Объектом  является круг выбранного
диаметра с относительной яркостью 1 на фоне с относительной яркостью 0. является круг выбранного
диаметра с относительной яркостью 1 на фоне с относительной яркостью 0.
2. вычисление спектра размытого объективом и смещенного изображения объекта в соответствии с выражением , (4) , (4)
где экспоненциальные множители – фазовые сдвиги, обеспечивающие смещение центра тяжести изображения элемента на
величину  и и  , соответствующих
дробной части координат xαn,k и yαn,k , , соответствующих
дробной части координат xαn,k и yαn,k ,  - оптическая передаточная функция (ОПФ) объектива в соответствии с известной формулой для дифракционно ограниченной системы - оптическая передаточная функция (ОПФ) объектива в соответствии с известной формулой для дифракционно ограниченной системы
 , (5) , (5)
 - предельная
пространственная частота ОПФ. - предельная
пространственная частота ОПФ.
3. вычисление цифрового
массива, соответствующего изображению круговой апертуры, смещенного
относительно решетки отсчетов на заданную величину и
 , (6) , (6)
где знак  - означает
обратное преобразование Фурье. - означает
обратное преобразование Фурье.
Полученное изображение каждого
элемента после операции квантования (например, на 256 уровней для 8 бит на
пиксел) и нормирования, вставляется затем в соответствующую область цифрового
массива данных, описывающего полную картину дискретного изображения марки.
Следует отметить, что как
при генерации изображения марки, так и в реальных условиях получения изображения
марки с цифровой камеры, неточности изготовления (генерации) самой марки, а
также ограниченное число уровней квантования в изображении марки являются
причиной появления координатной погрешности в форме случайного смещения каждого
элемента относительно идеальной решетки элементов марки. Отсюда следуют высокие
требования к точности выполнения марки, а также к числу уровней квантования и
шумам фотоприемной матрицы.
Описанная технология
генерации изображения марки для произвольного угла поворота предусматривает
вычисление M прямых и обратных преобразований
Фурье, где M – число элементов в марке. При
большом числе элементов модельные эксперименты, включающие синтез марки и ее
измерение, требуют большого объема вычислений.
Несмотря на достаточно
большое число исследованных вариантов совокупных параметров оптической марки
вряд ли можно утверждать, что были найдены абсолютно оптимальные варианты.
Модель представляет
возможность исследовать параметры полезного сигнала при пороговых угловых
смещениях изображения марки. Если область измерений ограничивается кругом с диаметром,
чуть меньшим диагонали матрицы, т.е. 8 мм, а центр вращения находится в середине матрицы, то крайние элементы марки при повороте на угол 360о проходят путь, равный длине окружности 8 π = 25 мм. Поскольку в полном угле содержится 1296000 угл. сек, то при повороте на 1 угл. сек
изображение крайних элементов перемещается примерно на 20 нм. Что происходит
при этом с изображением марки?
Возьмем разницу между
двумя модельными изображениями марки, с угловым сдвигом, равным 1 угл. сек. Расчеты
показывают, что на краях элементов (круговых апертур), имеющих максимальную
величину смещения, примерно для 10-12 пикселов получается различие в 1 уровень
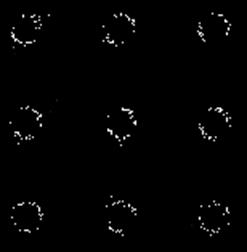
квантования, что иллюстрирует рис. 3 на увеличенном изображении фрагмента
картины модуля разностей изображений с нормировкой на полную яркость. Следует
отметить, что с одной стороны элементов по направлению вращения получается
изменение пикселов на +1 уровень квантования, а с дугой стороны – на -1 уровень
квантования. Фрагмент соответствует левому верхнему углу изображения марки;
направление на ось вращения - примерно через правый нижний угол. Для чистоты
эксперимента генерация изображений производилась без наложения шума.
Рис. 4
Виртуальные измерительные
эксперименты с оценкой абсолютной погрешности измерений как разности между результатами
вычисления угла по изображениям марки, синтезированным с помощью генератора и номинальными
значениями угла поворота марки при генерации их изображения проводились для 3
вариантов, основные параметры которых приведены в таблице 1.
Таблица 1
| Вариант
экспери-мента |
Размерность
матрицы, пикселы |
Размер
пиксела, мкм |
Число
элементов марки |
Разрешение
объектива , мм-1 |
Шум
фотоприем-ника, уровн. квант. |
Число
измерений |
| 1 |
1280х1024 |
5.2 |
357 |
50 |
1 |
3 |
| 2 |
3000х2200 |
3.5 |
825 |
70 |
1 |
3 |
| 3 |
5000х2200 |
4.2 |
1971 |
70 |
1 |
3 |
Результаты виртуальных
измерительных экспериментов для указанных вариантов приведены в таблице 2.
Таблица 2
| Вариант
эксперимента |
СКО
погрешности результата измерений (σ)
угл.
сек |
Максимальная
величина погрешности (3 σ)
угл.
сек |
| 1 |
0.18 |
0.53 |
| 2 |
0.04 |
0.12 |
| 3 |
0.007 |
0.022 |
Результаты моделирования
для варианта 1 хорошо коррелированны с результатами метрологической аттестации
экспериментального измерителя угла. Результаты моделирования по вариантам 2 и 3
с использованием светочувствительных матриц существенно больших размеров (до
24х36 мм) показывают, что потенциальные метрологические возможности новой
концепции измерения угла позволяют говорить о точности на уровне сотых долей
угловой секунды.
Выводы:
Описаны результаты экспериментальных
и модельных исследований по оценке метрологических характеристик измерителя
угла, выполненного в соответствии с новой концепцией измерения, заявленной
авторами и основанной на определении углового положения изображения оптической
марки на светочувствительной матрице цифровой камеры с использованием
алгоритмов обработки изображений и специальных алгоритмов обработки данных. Разработана
математическая модель измерителя угла, использующая генератор изображений
марки с любым углом поворота в декартовых координатах и стандартный для данного
измерителя алгоритм обработки данных. Метрологические исследования
экспериментального образца измерителя показала, что погрешность измерителя не
превышает 1 угл. сек. В результате модельных исследований показано, что
потенциальный уровень точности новой технологии измерений угла находится на
уровне сотых долей угловой секунды.
* КМОП - Комплиментарно-симметричная
структура Металл-Окисел-Полупроводник, (англ. CMOS -
Complementary-symmetry/metal-oxide-semiconductor).
Литература:
1. Проспект фирмы СКБ ИС (www.skbis.ru),
2. Проспект фирмы HEIDENHAIN GmbH (www.heidenhain.de)
3. Проспект фирмы RENISHAW (www.renishaw.com)
4. Королев А.Н., Полищук Г.С., Лукин А.Я., Патент РФ № 109847 «Измеритель угла».
5. Проспект фирмы ЕС-ЭКспертс» (www.es-experts.ru)
6. S.V.Gordeev, B.G.Turukhano, Investigation of the interference field of two spherical waves for holographic
recoding of precision radial diffraction gratings, Optics & Laser
Technology, vol. 28, № 4, p. 255-261.
7. Королев А.Н., Гарцуев, А.И., Полищук Г.С., Трегуб В.П., Метрологические исследования и выбор
формы оптической марки в цифровых измерительных системах, Оптический журнал, выпуск
6, том 77, июнь 2010, стр. 25-27.
наверх
|